服務(wù)熱線
135-3059-7494

手機(jī):135-3059-7494


您現(xiàn)在的位置:首頁(yè) > 新聞動(dòng)態(tài) > 行業(yè)新聞
CCD視覺(jué)定位系統(tǒng)工作原理
ccd視覺(jué)定位由于數(shù)字圖像處理和計(jì)算機(jī)視覺(jué)技術(shù)的迅速發(fā)展,越來(lái)越多的研究者采用攝像機(jī)作為全自主用移動(dòng)機(jī)器人的感知傳感器。這主要是因?yàn)樵瓉?lái)的超聲或紅外傳感器感知信息量有限,魯棒性差,而視覺(jué)系統(tǒng)則可以彌補(bǔ)這些缺點(diǎn)。
ccd視覺(jué)定位算法:基于濾波器的定位算法主要有KF、SEIF、PF、EKF、UKF等。也可以使用單目視覺(jué)和里程計(jì)融合的方法。以里程計(jì)讀數(shù)作為輔助信息,利用三角法計(jì)算特征點(diǎn)在當(dāng)前機(jī)器人坐標(biāo)系中的坐標(biāo)位置,這里的三維坐標(biāo)計(jì)算需要在延遲一個(gè)時(shí)間步的基礎(chǔ)上進(jìn)行。
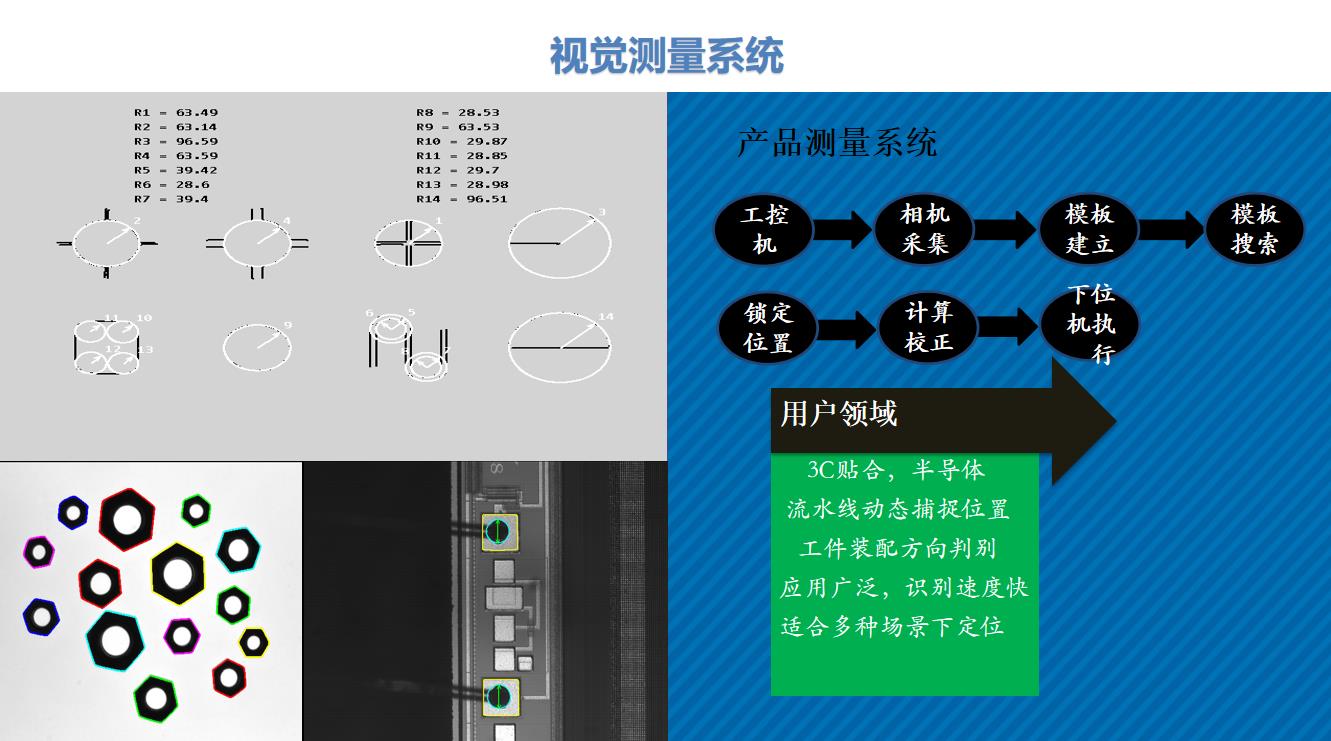
視覺(jué)定位系統(tǒng)的好處:
1、視覺(jué)定位精度高,穩(wěn)定。
2、定位速度快,可一次掃描多個(gè)孔徑位置。
3、可以作為基準(zhǔn)生成程序,其它產(chǎn)品可直接按此程序自動(dòng)加工。
案例分享:
沖壓模具的刀口板、固針板、退料板需在同一位置鉆孔,重疊一起待沖針通過(guò)。其中,刀口板鉆孔完后需作后處理,存在無(wú)規(guī)則變形現(xiàn)象。如果固針板和退料板還是按最初的圖紙加工,三塊板可能存在錯(cuò)位沖針無(wú)法通過(guò)。而使用視覺(jué)定位系統(tǒng)可以將刀口板變形后的孔位置進(jìn)行采集,自動(dòng)生成程序至數(shù)控系統(tǒng)。固針板和退料板按采集后的孔位置數(shù)據(jù)進(jìn)行加工,這樣就有效避免了變形后的位置誤差問(wèn)題!
在長(zhǎng)期的加工經(jīng)驗(yàn)累積中,往往會(huì)有很多新奇的點(diǎn)子冒出來(lái),會(huì)使得加工過(guò)程更順暢。這就需要客戶把自己的想法和需求與機(jī)床廠家多溝通,講出您需要的,剩下的我們來(lái)為您專屬定制,最后產(chǎn)出更適合自己設(shè)備。
以上就是CCD視覺(jué)定位系統(tǒng)工作原理,視覺(jué)定位系統(tǒng)的好處的介紹,希望可以幫助到大家,同時(shí)想要了解更多視覺(jué)定位系統(tǒng)資訊知識(shí),可關(guān)注日弘智能的更新。

日弘智能是提供:運(yùn)動(dòng)控制器,運(yùn)動(dòng)控制卡,視覺(jué)激光打標(biāo)機(jī)系,視覺(jué)點(diǎn)膠機(jī)系統(tǒng)視覺(jué)運(yùn)動(dòng)控制系統(tǒng),Ethercat總線控制器,價(jià)格咨詢,控制器選型以及各型號(hào)庫(kù)存現(xiàn)貨供應(yīng)等服務(wù)。
